
ACADIA 2020 | DISTRIBUTED PROXIMITIES | October 24-30, 2020 | Online + Global
Workshops
As part of the Distributed Proximities conference, ACADIA is pleased to offer a lineup of exciting workshops led by expert instructors from around the globe. The conference chairs have curated workshops that uniquely address the conference's theme of distributed modes of working and collaboration, including topics such as remote robotics, co-design, machine learning, and much more.
The workshops will take place Saturday October 24 and Sunday October 25 directly before the conference. All workshops will occur online via Zoom or similar video conferencing platform. This year, generous funding from Autodesk will enable us to provide scholarships and grants to students and professionals in partnership with NOMA, NOMAS, and schools of architecture in Mexico. Please see the Grants page for more information and application links.
Workshops are eligible for AIA Continuing Education credit. See the listings below for the credits available for each workshop.
Note about software licenses: Unless otherwise indicated in the workshop descriptions below, workshop participants are responsible for installing the required software on their personal computers and securing all necessary licenses. In most cases, software companies provide trial licenses and/or educational licenses that will be sufficient for the duration of the workshop. Please read the software requirements for each individual workshop below.
Questions about workshops? Email 2020@acadia.org
Workshop 01: KUKA|crc: Cloud Remote Control
Workshop 02: Dual-Additive Manufacturing Combining Timber and In-Process Bio-Based 3D-Printing
Workshop 03: ART: Augmented Robotic Telepresence
Workshop 04: Sequin Sequencing
Workshop 05: Generative Physics: Dynamic Systems Within Immersive Projection-Mapped Environments
Workshop 06: Digital Borgo: From 3d Scanning and Digital Surveys to Collective Spaces of Design
Workshop 07: Collaborative Computation with Hypar
Workshop 08: Architectural Geometry & Morphing Patterns
Workshop 09: In Silico, In Vitro, In Vivo: Programming in Processing and in Life
Workshop 10: Writing With The Machine
Workshop 11: Deepdesign: Architecture & 2D to 3D Style Transfers with Neural Networks
Workshop 12: Space Frames for a Space Fleet
Workshop 13: Constructing Cognition
Workshop 14: Generative Design In and Beyond Revit
Workshop 15: Design to Experience: Leveraging Speckle As A Conduit for Unreal Engine in AEC
WORKSHOP 01
KUKA|crc: Cloud Remote Control
Workshop Leaders:
Ethan Kerber (Researcher, Chair of Individualized Production | RWTH Aachen University)
Dr.-Ing. Sven Stumm (Senior Researcher, Robots in Architecture Research UG LLC)
with guest lectures by Sigrid Brell-Cokcan and Johannes Braumann (RWTH Aachen / Robots in Architecture)

As architects, engineers, educators & builders, we rely on working closely together to create innovative structures. Inspired by this new need for social distancing, Robots in Architecture Research has developed a cloud-based approach to working remotely with robotics: KUKA|crc. Cloud Robot Control enables industrial access through online collaboration. In this workshop, participants will learn to remotely simulate robotic movements, program robots over the cloud, monitor fabrication progress and adapt in real time to inaccuracies in material, all while controlling the process from their own international location. The goal of this workshop is to advance the capability of remote robotic fabrication while prototyping new methods of adaptivity based on available process data. Construction relies on large international teams collaborating in close quarters to create ambitious structures. Inspired by this challenge, the aim of Cloud Robot Control is to extend remote robotic capabilities to the building site, enabling automated, adaptive and collaborative processes to bring a new level of digitization and innovation to the construction industry. Through the ACADIA 2020 Cloud Robot Control Workshop, an international group of artists, architects, and engineers will have a chance to experience automated construction in a new digital way.
Keywords: Collaboration & Co-Design; Remote Robotics
Software: Rhino & Grasshopper (trial license or educational license available here; KUKA|prc (license to be provided by workshop leaders)
Previous Knowledge Required: Intermediate knowledge of Rhino & Grasshopper
Workshop Schedule: October 24 and 25, 9:00am to 2:00pm EST POSTPONED to November 7 and 8, 9:00am to 2:00pm EDT
AIA Continuing Education: Completion of this workshop earns 8 AIA Learning Units.
WORKSHOP 02
Dual-Additive Manufacturing Combining Timber and In-Process Bio-Based 3D-Printing
Workshop Leaders:
Hans Jakob Wagner, MSc ITECH (ICD University of Stuttgart)
Dylan Marx Wood, MSc ITECH (ICD University of Stuttgart)
Tiffany Cheng, MDesS, B.Arch (ICD University of Stuttgart)
Chai Hua, M.Arch (ICD University of Stuttgart / Tongji University)
Luis Orozco, M.Arch (ICD University of Stuttgart)
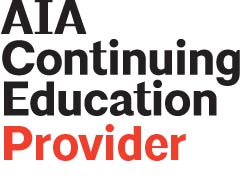
This workshop explores the novel potentials for timber construction and computational design that arise at the intersection of rapid additive robotic assembly of timber elements and in-process bio-based 3D-printed connections. Participants will enter a virtual control room that is ready-equipped with finely crafted digital tools that will allow them to collaboratively control and directly initiate a robotic construction process in the Computational-Construction Laboratory of the Institute of Computational Design and Construction at the University of Stuttgart, Germany. A heavy-duty industrial robot arm on a 12m linear axis is equipped with a vacuum-gripper and a 3D printing effector that achieves bead-widths of up to 5mm thickness. The focus will be set on developing novel additive assembly sequences and interfaces leveraging the unique fabrication setup. The intent is to then automate the production of a series of 1.0 x 1.0 x 0.4 m prototype components each with different internal material arrangement. In parallel, the production sequence for a larger slab component will be explored and analysed digitally, and the internal arrangements documented through a series of layered line drawings. In a fast-paced cyber-physical robotic fabrication charrette this 4 x 2m big structural timber slab will be produced taking turns in collaboratively controlling the time-agnostic robotic setup according to participant’s global time zones.
Keywords: Remote Robotics; Timber Construction; 3d-Printed Joinery
Software: Rhino & Grasshopper (trial license or educational license available here)
Previous Knowledge Required: Intermediate knowledge of Rhino & Grasshopper; Basic coding skills
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST (additional appointments may be scheduled following the main session)
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 03
ART: Augmented Robotic Telepresence
Workshop Leaders:
Ebrahim Poustinchi (Kent State University / Robotically Augmented Design Lab)
Mona Hashemi, Graduate Assistant (Kent State University / Robotically Augmented Design Lab)
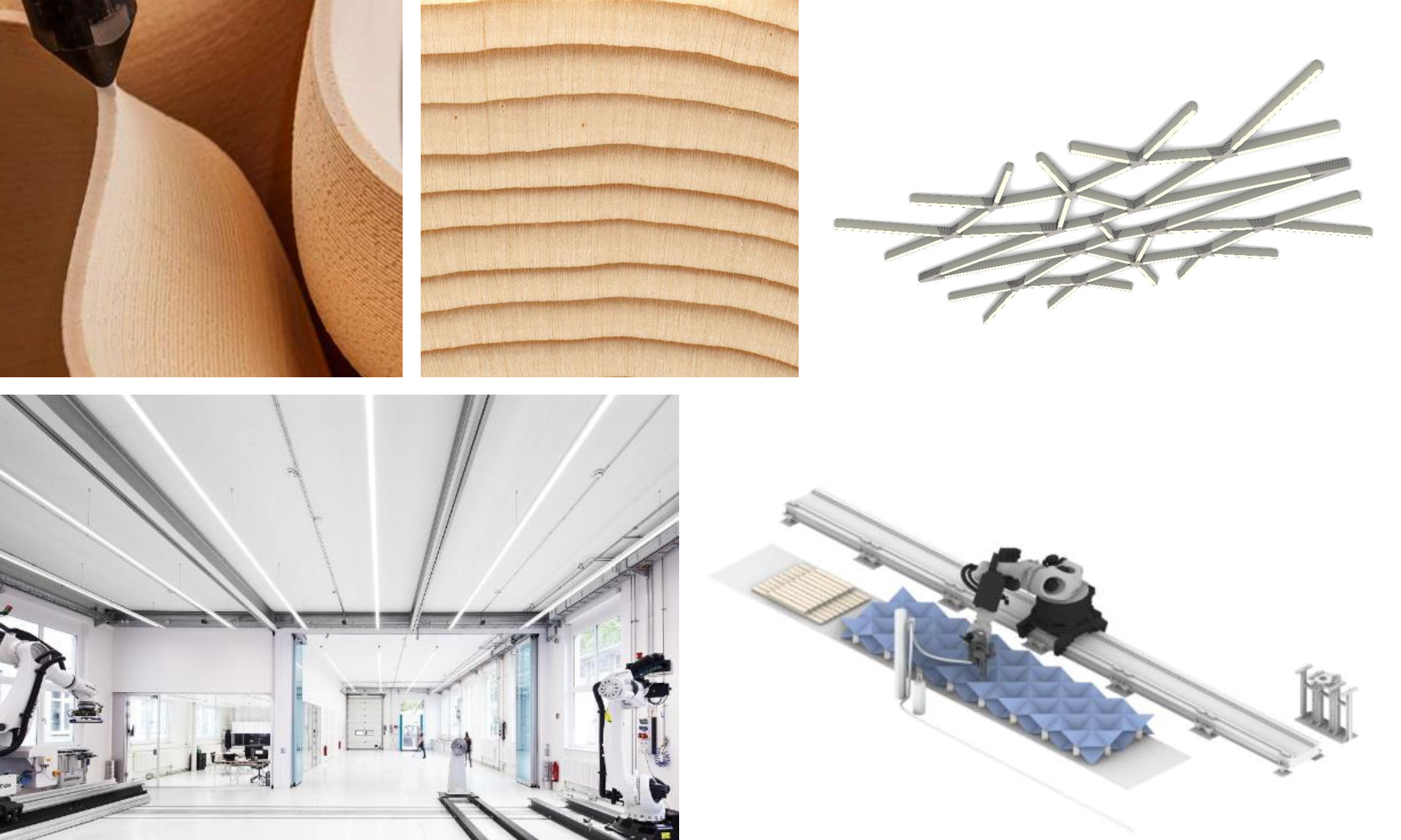
Augmented Robotic Telepresence (ART) revisits the concept of “digital fabrication” as fabrication of digitality, through digitalizing the physical and physicalizing the digital. Employing native digital/physical interpreters—robot arms and augmented reality platforms—ART investigates possible mediums to hybridize realities of actual and virtual, to establish a workflow between a custom-made AR camera mounted on a robot arm, and a curated robotic motion, remotely programmed/controlled, as means of telepresence. Using the virtual workshop platform as an opportunity, the ART workshop will allow participants to remotely utilize the resources of the Robotically Augmented Design (RAD) Lab at Kent State University. The workshop instructors will enable the safe use of the robots, videography tools mounted on the robots, projection mapping, and custom robot end-effectors, for participants. Workshop participants will engage in a hybrid digital/physical workflow: developing a robotic videography/walkthrough path for the UR10 robot arm to capture a curated presence at RAD Lab, through hybridized real-time videography of the AR “scene,” developed using Maya and Unity3D.
Keywords: Remote Robotics; Augmented Reality
Software: Rhino & Grasshopper (trial license or educational license available here), Autodesk Maya (Autodesk provides free licenses for students), Unity (free version available for individual users)
Previous Knowledge Required: Basic Knowledge of Rhino/Grasshopper; familiarity with Maya interface is highly recommended but not required.
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 04
Sequin Sequencing
Workshop Leaders:
Amina Blacksher (Atelier Office / Columbia GSAPP)
Mitch McEwen (Atelier Office / Princeton)
in collaboration with Zahner

se·quin /ˈsēkwin/ (noun): a small, shiny disk sewn as one of many onto clothing for decoration.
This workshop focuses on part-to-part relationships that can define surface behaviors and visual effects. The tectonic logic tasks the decorative parcel to perform collectively as structure. In this workshop the part of interest is the sequin. Operating spatially as a node with a center and materially as a module, techniques of assembly are explored to articulate a link logic to arrive at a self-supporting construction. Working with industry partner Zahner, participants will gain an introduction to robotic prototyping for full-scale distributed construction from file preparation and machine tacit knowledge.
The workshop will guide participants through a sheet metal detailing tutorial, illustrating how to represent metal panels in paper and connection types. Using paper will act as a stand-in for sheet metal components – allowing for simplified fabrication methods while still surfacing the challenges inherent in a full digital fabrication workflow for part to part assembly. Participants will gain an introduction to material and finish through a discussion of base materials, finishes, polishing, alloys, coatings, patina, aging, etc. The guidance will focus on qualities of the sequins both as individuals and aggregates to calibrate the simulation of an assembly.
Keywords: Part-to-part Relationships; Metal Fabrication & Detailing; Remote Robotics
Software: Rhino & Grasshopper (trial license or educational license available here)
Previous Knowledge Required: Proficiency in Rhino/Grasshopper
Workshop Schedule: October 24 and 25, 10:00am to 4:00pm EST (additional appointments may be scheduled following the main session)
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 05
Generative Physics: Dynamic Systems Within Immersive Projection-Mapped Environments
Workshop Leaders:
Alida Sun, Artist (link)
Jeffrey Halstead, Architect (link)

This workshop introduces participants to new methods of collaboration and communication across disciplines of art and architecture, as well as tools and workflows that respond to our current condition of being online, but that do not sacrifice the value or caliber of the work. Workshop participants will be guided through projection mapping techniques and their real-time integration with physics simulation & live-action modeling/sculpting, producing a singular work that is simultaneously developed and experienced in different parts of the world.
Participants will be introduced to a series of generative art techniques using algorithmic systems and physics simulators. In addition, workshop participants will be introduced to a variety of toolkits to convey ideas of form that register different actions and events that have taken place over a period of time or are occurring in real-time. Participants will also receive an overview of TouchDesigner to develop and augment workflows that can alter form or perception of form with a visual thesis in mind. Finally, students will design environments to be re-rendered in real-time and projected onto an assemblage of materials arranged in a physical space designed by workshop leaders. We will use TouchDesigner to integrate and transform multiple action-based visuals into immersive projections.
Keywords: Immersive Environments; Algorithms; Motion Design; Collaboration & Co-Design
Software: TouchDesigner (free trial available)
Previous Knowledge Required: Familiarity with TouchDesigner is encouraged but not required.
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
Thanks to Technology Sponsor TouchDesigner for providing software licenses for this workshop.
WORKSHOP 06
Digital Borgo: From 3d Scanning and Digital Surveys to Collective Spaces of Design
Workshop Leaders:
Maya Alam (AP Practice, University of Pennsylvania)
Daniele Profeta (AP Practice, Syracuse University)
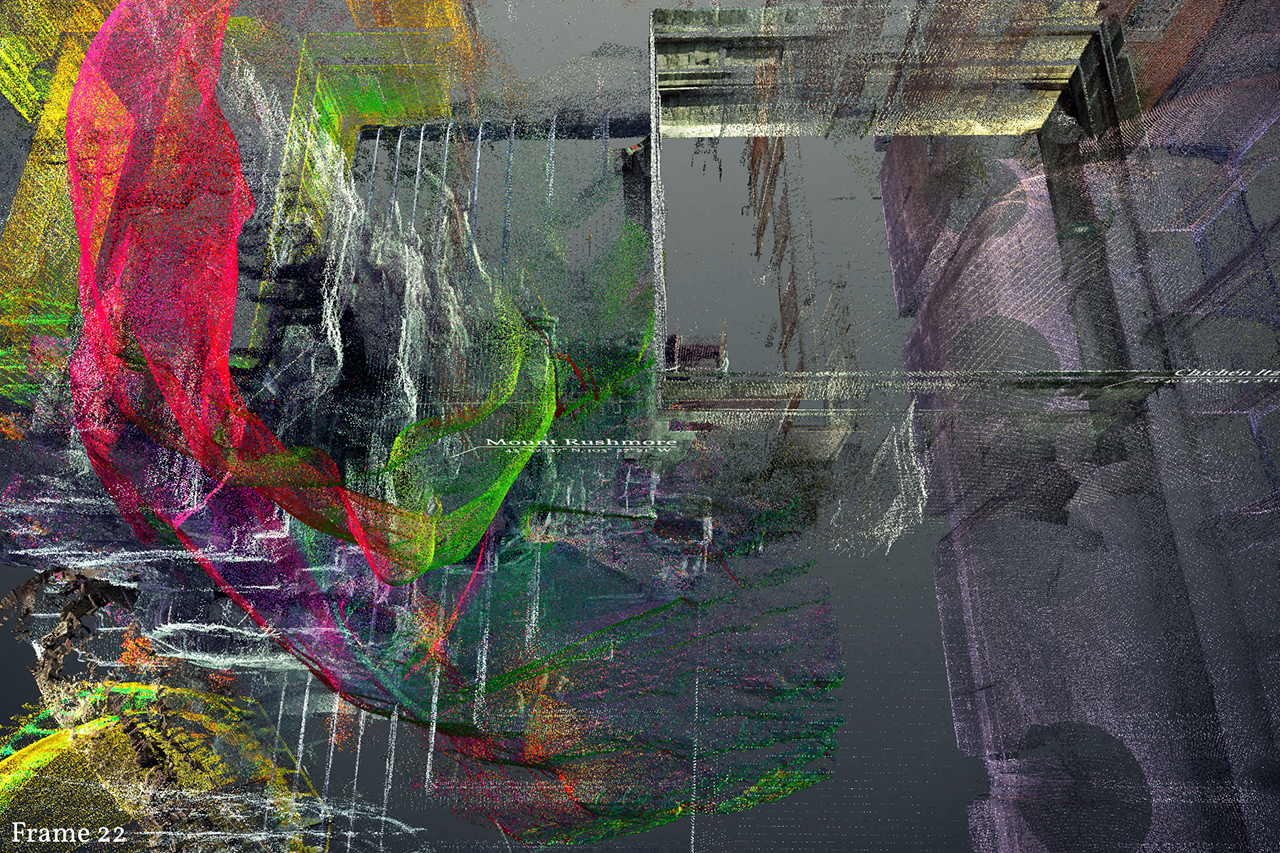
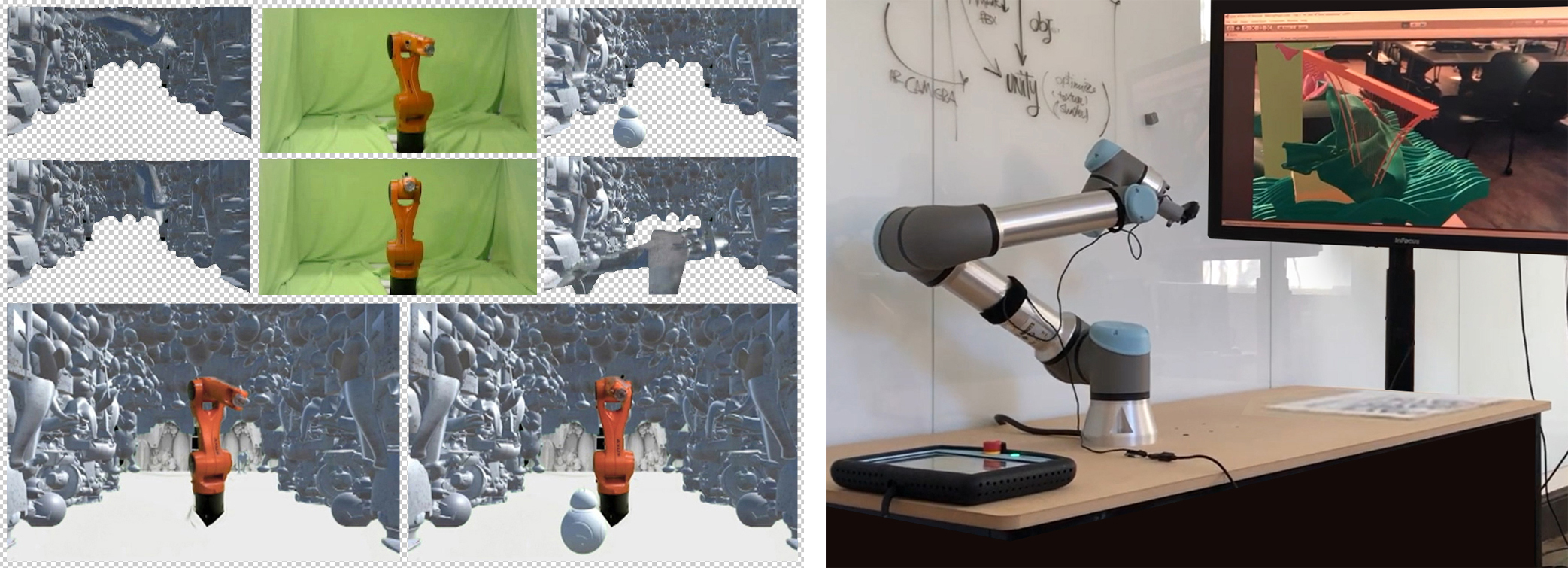
This workshop will focus on contemporary surveying and imaging technologies in an effort to challenge the semantic tropes that are produced when dealing with historical artifacts in a monolithic way. How can design practices leverage these modes of vision to develop a multi-faceted understanding of the built environment? Can these digital traces of the city stimulate participatory design protocols to construct a collective space of design? The workshop will introduce photogrammetry, mesh editing workflows, and animation strategies to construct immersive digital surveys of existing building environments. Participants will be introduced to a variety of methodologies to obtain digital survey data, ranging from individual photogrammetry models, to GIS data clouds and Google Earth, as well as animation and compositing techniques in Autodesk Maya and Adobe After Effects. The final output will be a short video where multiple animated point-cloud environments will begin to speculate on the role of representation in practices of adaptive re-use. The workshop participants will collaboratively construct what we will call a “Digital Borgo.” Borgo is an Italian word referring to small villages that historically emerged outside the defensive infrastructure of larger political centers to survey, manage, and control peripheral territories of the region. In the space of this workshop, each participant will contribute a digital trace from their physical territory – a collective act of sharing to lay a common ground for speculation.
Keywords: 3D Scanning; Photogrammetry; Mesh Editing; Animation
Software: Agisoft Metashape (trial license available), MeshLab (open source), Rhino 6 (trial license or educational license available here), Autodesk Maya and Arnold Renderer (trial license or educational license available), Adobe After Effects (trial license available)
Previous Knowledge Required: Familiarity with Rhino modeling; Basic knowledge of Autodesk Maya (familiarity with user interface); Rendering and animation experience is a plus (but not required).
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 07
Collaborative Computation with Hypar
Workshop Leaders:
Andrew Heumann (Hypar and Columbia GSAPP)
Eric Wassail (Hypar)
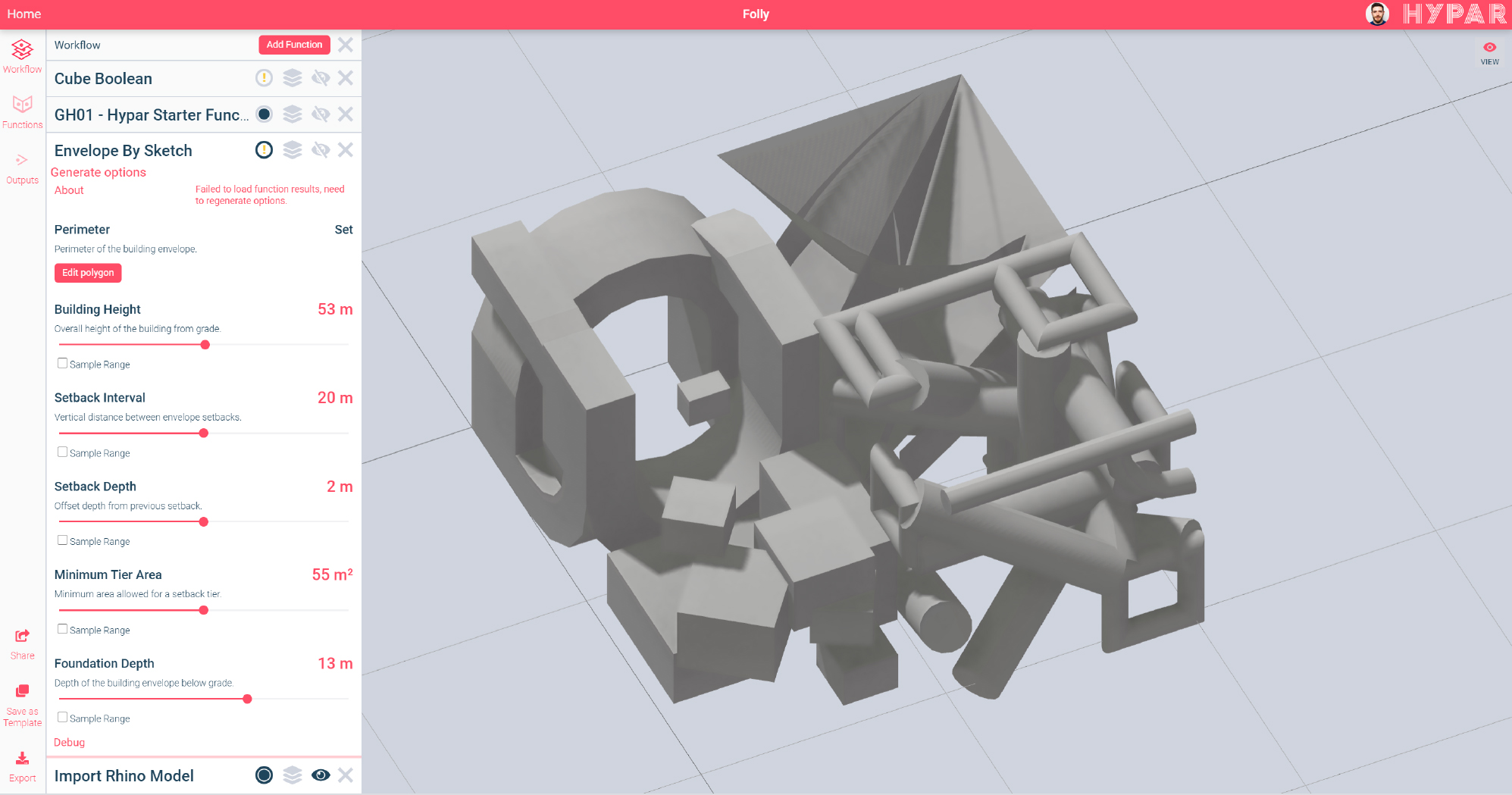
In this workshop, participants will explore the potentials of Hypar — a new cloud-based computational and generative design platform — to collaborate and co-design through the sharing and encapsulation of design knowledge as algorithmic functions. Participants will learn to use Grasshopper and/or C# to author Functions on Hypar, which encapsulate a single step in a design process, and can be combined into more complex workflows. We will leverage Hypar's fully web- and cloud-based computational design platform to explore new possibilities for remote collaboration and creative production. As a group, we will build up a library of reusable functions which can be shared and composed into workflows and projects. Together we'll design a range of sculptural architectural "follies" utilizing each other's Functions. Over the course of the workshop, participants will explore many conceptual issues above and beyond the technical specifics of Hypar's platform, including algorithmic knowledge capture, architectural problem decomposition, and schematized object ontologies.
Keywords: Collaboration & Co-Design; Algorithmic & Procedural Modeling
Software: Rhino & Grasshopper (trial license or educational license available here)
Previous Knowledge Required: Proficient in Rhino + Grasshopper, C# experience is a plus.
Workshop Schedule: October 24 and 25, 10:00am to 5:00pm EST
AIA Continuing Education: Completion of this workshop earns 10 AIA Learning Units.
Thanks to Technology Sponsor Hypar for supporting this workshop.
WORKSHOP 08
Architectural Geometry & Morphing Patterns
Workshop Leaders:
Angelica Videla (Universidad de Chile + Arquitectura Grupal)
Gonzalo Muñoz (Universidad de Chile + Arquitectura Grupal)
Alberto Fernández (Universidad de Chile + UCL Bartlett)

In this workshop, the participants will explore procedural polygon modeling methodology in Maya and Blender by a process that breaks down a complicated task into discrete modeling operations. In addition to procedural polygon modeling, the participants will also learn how to integrate topological patterns into the low-poly modeling workflow through morphing patterns. A series of procedural polygon modeling techniques will be demonstrated and provided to the participants through which the design work will be undertaken. The ambition of the workshop is to develop formal and aesthetic qualities and that are not indifferent to their processes. The workshop will use building skins as the playground for this design investigation. The skills that will be explored in the workshop include low-poly geometry components and organizational logic, sculptural mesh modeling, and discrete modeling operations. The workshop will be taught using Maya and Blender. Workshop participants will design highly expressive building facades that integrate surface, structure, and ornament into an irreducible assemblage of compressed tectonics.
Keywords: Form-Finding; Procedural Modeling
Software: Maya (free trial or educational license), Blender (open source)
Previous Knowledge Required: Beginner-level knowledge of Maya and mesh modeling.
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST (additional appointments may be scheduled following the main session)
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 09
In Silico, In Vitro, In Vivo: Programming in Processing and in Life
Workshop Leaders:
Martyn Dade-Robertson (Hub for Biotechnology in the Built Environment, Newcastle University)
With contributions from Carolina Ramirez Figueroa (Royal College of Art) and various members from the Hub for Biotechnology in the Built Environment.
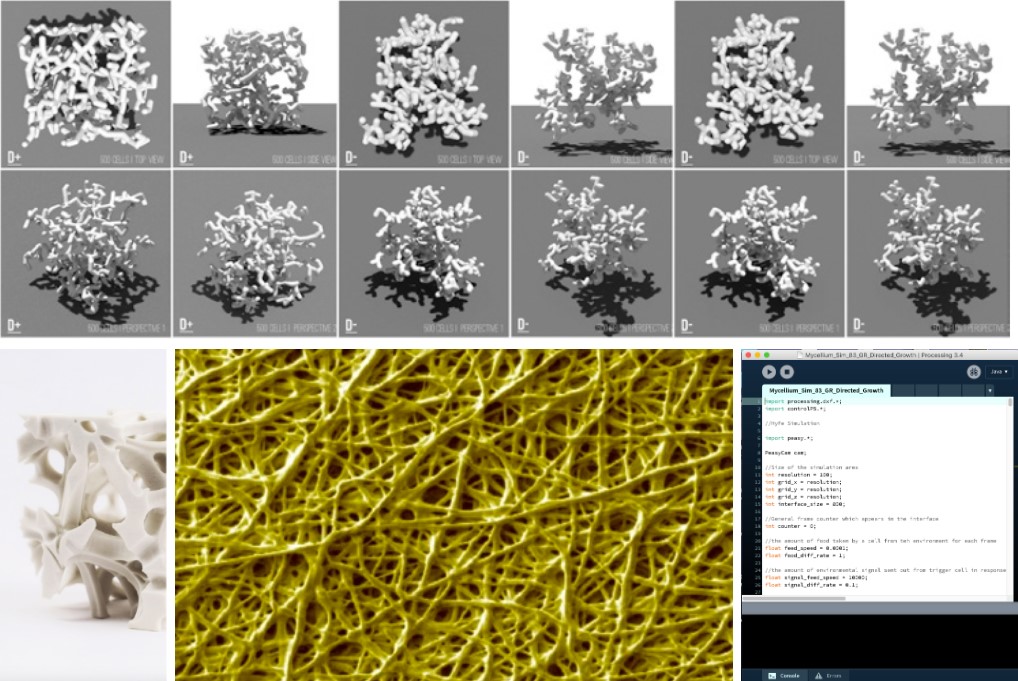
This workshop is an introduction to biological modeling using the Processing programming language. The backbone of the workshop will be a series of two 5-hour crash courses in the Processing language for complete beginners. This will act as an introduction to the core concepts of programming and Object-Oriented Programming – including writing functions and objects. The workshop will be organized around the building of a simple Diffusion Limited Aggregation (DLA) system which simulates agents (cells) which aggregate in response to a simulated chemical signal. The resulting aggregations lead to branching patterns in 2D and possibly 3D. Developing this simple biological model, we will also explore ideas of self-organising systems and emergence in biological pattern forming and show the universality of certain types of model. The DLA model we will develop, for example, can be effective at modeling viral transmission (which is itself a type of biological patterning). The workshop will give the participants some of the fundamentals they need to begin to code for biological simulations and we will include links to online resources and relevant books and articles to help them develop further as well as sharing our code examples with the group. We will also introduce fundamentals of biological pattern making and the field of Synthetic Biology - looking to the future of biology as a programmable medium for design.
Keywords: Morphogenesis; Synthetic Biology; Diffusion Limited Aggregation; Agent-Based Modeling
Software: Processing (open source)
Previous Knowledge Required: No previous knowledge is necessary and the workshop will act as an introduction to the fundamentals of programming.
Workshop Schedule: October 24 and 25, 8:00am to 5:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 10
Writing With The Machine
Workshop Leader:
Mitchell Akiyama (John H. Daniels Faculty of Architecture, Landscape and Design, University of Toronto)
This workshop will lead participants through a series of guided writing exercises that are intended to nudge writers away from the inherited, freighted language of conventional academic writing. Over several years of teaching creative writing to architects and artists, the workshop leader has observed that many, if not most people, really don’t like to write, and very few write with a natural ease or personal flair. The workshop will begin on day one with a discussion about literary voice and form, after which participants will engage in a series of exercises designed to defamiliarize conventional modes of writing. During the second session, we will workshop these texts, focusing on voice and style. The workshop will then turn to an exploration of the influence of Artificial Intelligence (AI) and Machine Learning (ML) on creative production (in general) and on creative writing (in particular). The goal for this work will be to start a loop in which humans and machines write together, hopefully leading to a more nuanced understanding of how AI Natural Language algorithms work, but more importantly we will ask, what do we want from AIs?
Keywords: Creative Writing; Machine Learning and AI; Writing with Machines
Software: Under the Dog Star (free)
Previous Knowledge Required: Paragraphs, sentences, words, typing
Workshop Schedule: October 24 and 25, 10:00am to 5:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 11
Deepdesign: Architecture & 2D to 3D Style Transfers with Neural Networks
Workshop Leaders:
Alexandra Carlson (University of Michigan Robotics)
Dr. Sandra Manninger (University of Michigan, Taubman College)
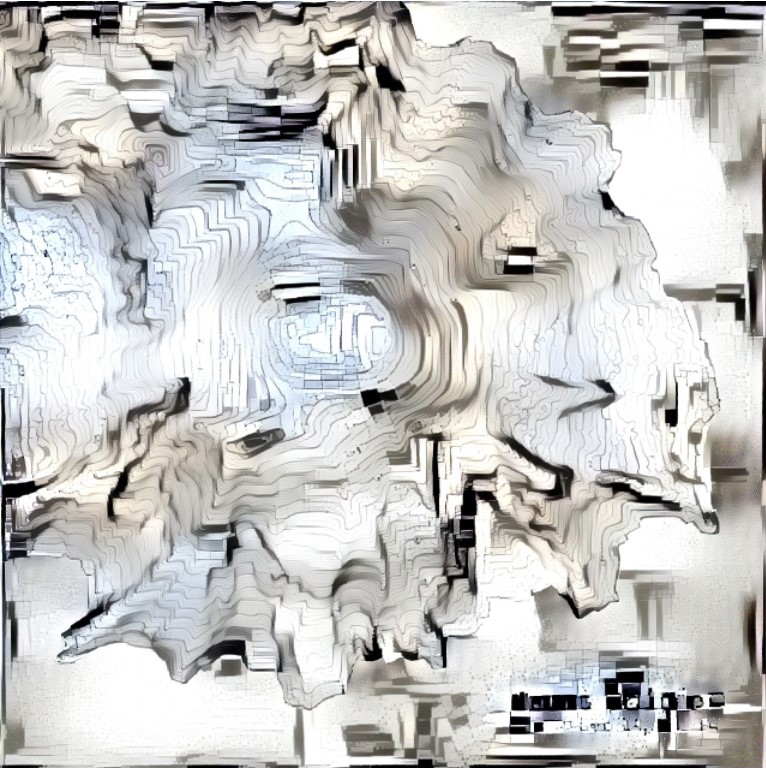
The rise of artificial intelligence (AI) and machine learning (ML) in recent years has posed a challenge to the architecture community. How will this novel technology impact our profession? This workshop interrogates the rise of ML from two distinct directions: The implication for the discourse of the discipline and the technical know-how to make an impact as an architect in the emerging ecology of ML applications. The goal of the DeepDesign workshop is to introduce participants, uninitiated in the use of ML in architecture, to a specific method of design with neural networks, 2D-3D neural style transfer. This method allows for backpropagating the stylistic qualities of images onto a three dimensional model. AI design technologies might be the first genuinely 21st century design techniques, as they question the role of the sole genius, perpetuated by the postmodern era, and propose a conversation between the creativity and ingenuity of both, mind and machine. In close collaboration with Michigan Robotics, participants will learn how to employ neural networks into a design protocol. This training is designed to introduce participants to the workings of ML applications.
Keywords: Machine Learning; Neural Networks; Style Transfer
Software: Photoshop (trial license available); Rhino & Grasshopper w/ Python (trial license or educational license available here); Paperspace (Note: workshop participants may need to individually purchase credits on Paperspace for access to the cloud computing platform. Estimated costs for this are $20 per participant.)
Previous Knowledge Required: Intermediate knowledge of Rhino; Adobe CS; a basic understanding of scripting languages is welcome but not a requirement.
Workshop Schedule: October 24 and 25, 11:00am to 6:00pm EST
AIA Continuing Education: Completion of this workshop earns 10 AIA Learning Units.
Thanks to Technology Sponsor PaperSpace for supporting this workshop.
WORKSHOP 12
Space Frames for a Space Fleet
Workshop Leaders:
Dr. sc. Mathias Bernhard (Digital Building Technologies, ETH Zurich)
Prof. Dr. Masoud Akbarzadeh (Polyhedral Structures Laboratory, Weitzman School of Design, University of Pennsylvania)
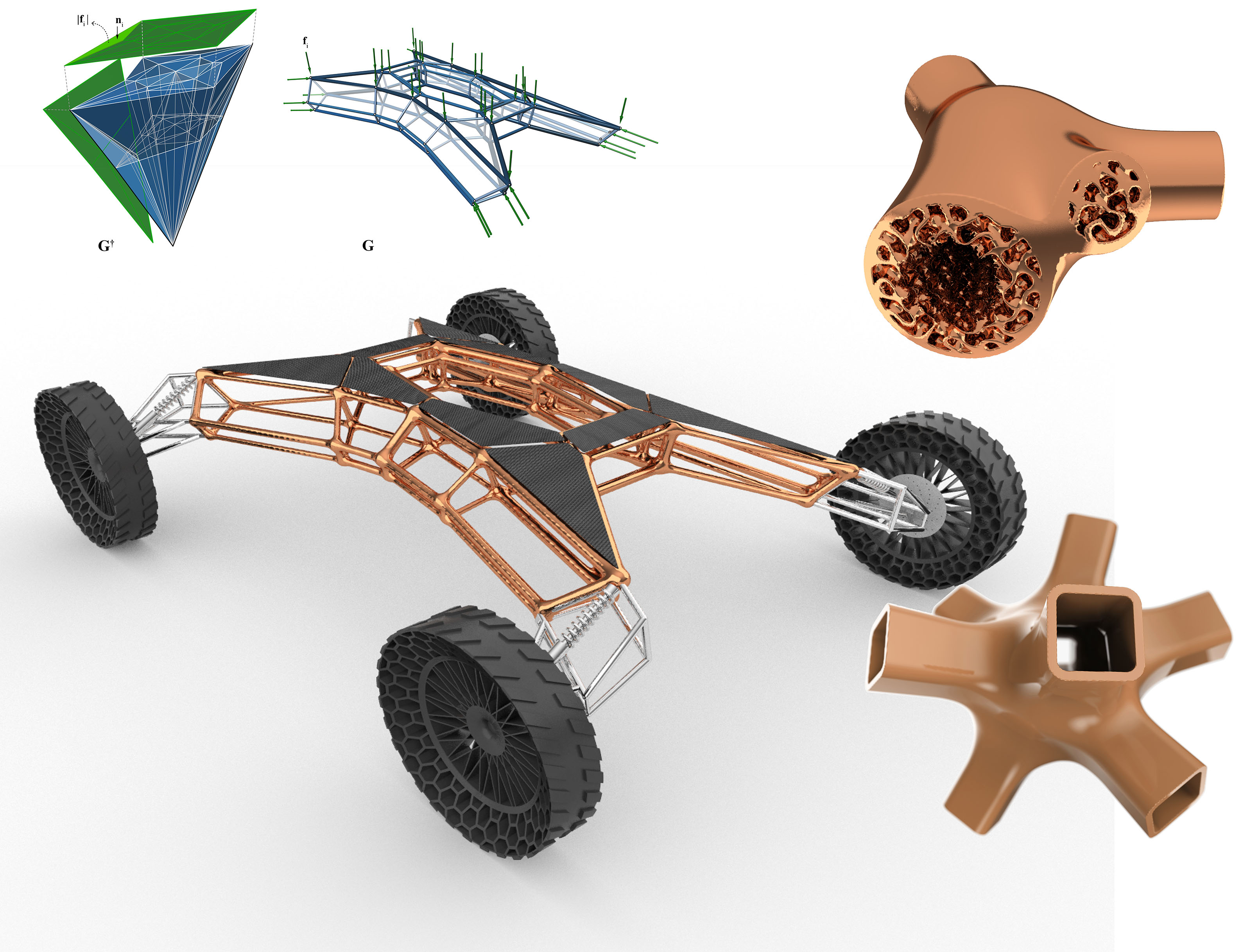
This workshop will explore the design of space frame structures and network trusses, focusing specifically on how specialized design tools can produce customized one-of-a-kind components at a high level of detail, geometrically unconstrained, and at a constant cost regardless of complexity. Participants will be introduced to PolyFrame by PSL, a Rhino plugin that allows the construction and manipulation of reciprocal polyhedrons for structural form finding, and Axolotl by DBT, a Grasshopper plugin that allows the creation, combination and modification of shapes in constructive solid geometry trees using Volumetric Modeling (VM).
The goal of the workshop is to establish a workflow from the abstract purely topological layout of a space frame structure all the way to the generation of different formats of print data. We will demonstrate a sequence of both standard and highly specialized custom design instruments, provide help for the successful use of them, and highlight opportunities for possible interventions. The design task for the workshop participants will be to imagine, invent and plan a hypothetical vehicle: a Mars rover. In addition to introducing workshop participants to a new palette of design instruments for their daily architectural practice, the outcome of the workshop will be a virtual fleet of imaginary vehicles in the form of renderings, 3d models, and the data ready for their digital fabrication.
Keywords: Lightweight Structures; Design and Optimization; 3D Graphic Statics; Volumetric Modeling
Software: Rhino & Grasshopper (trial license or educational license available here), Axolotl plugin (free), PolyFrame for Rhino (free)
Previous Knowledge Required: Basic knowledge of Rhino and Grasshopper, programming knowledge beneficial but not mandatory
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 13
Constructing Cognition
Workshop Leaders:
Alessio Erioli (University of Bologna, Co-de-iT)
Alessandro Mintrone (University of Bologna)
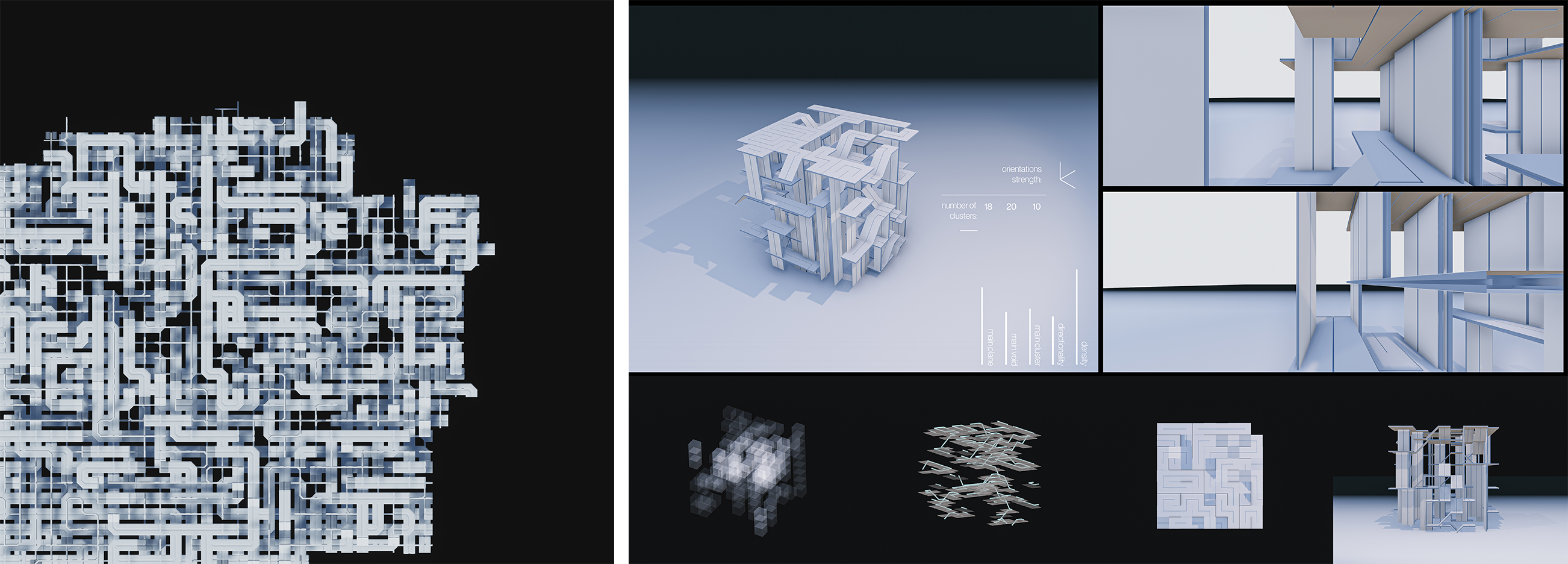
This workshop explores iterative assemblages of discrete parts driven by an implementation of the Wave Function Collapse algorithm, combined with machine learning techniques operating at the decisional level, focusing on the generation of complex and heterogeneous spatial conditions. Participants will work with a discretized representation of space (a 3-dimensional voxel matrix) and explore how the inception of an AI system can lead to a cognitive understanding and deployment of emergent qualities in the assemblage. The workshop will explore ways to short-circuit the analysis and the design phases, developing an agency to learn from experience and then produce an inherent sensibility.
Working in Tensorflow and Unity 3D, participants will develop procedural aggregations by arranging a collection of geometric tiles according to adjacency and frequency. Utilizing machine learning techniques, participants will then train a neural network to explore how different spatial conditions can emerge in the aggregation. Participants will also learn bespoke visualization techniques in order to produce video and still images that showcase the spatial qualities of the outcomes while keeping track of the training process with Tensorboard.
Keywords: Artificial Intelligence; Machine Learning; Assemblages; Computation
Software: Unity3D (free license available), Tensorflow (open source), [optional: possession of a 3D modeling software capable of exporting .OBJ or .FBX files]
Previous Knowledge Required: Basic digital 3D modeling skills
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
WORKSHOP 14
Generative Design In and Beyond Revit
Workshop Leaders:
Lilli Smith (Autodesk)
Zach Kron (Autodesk)
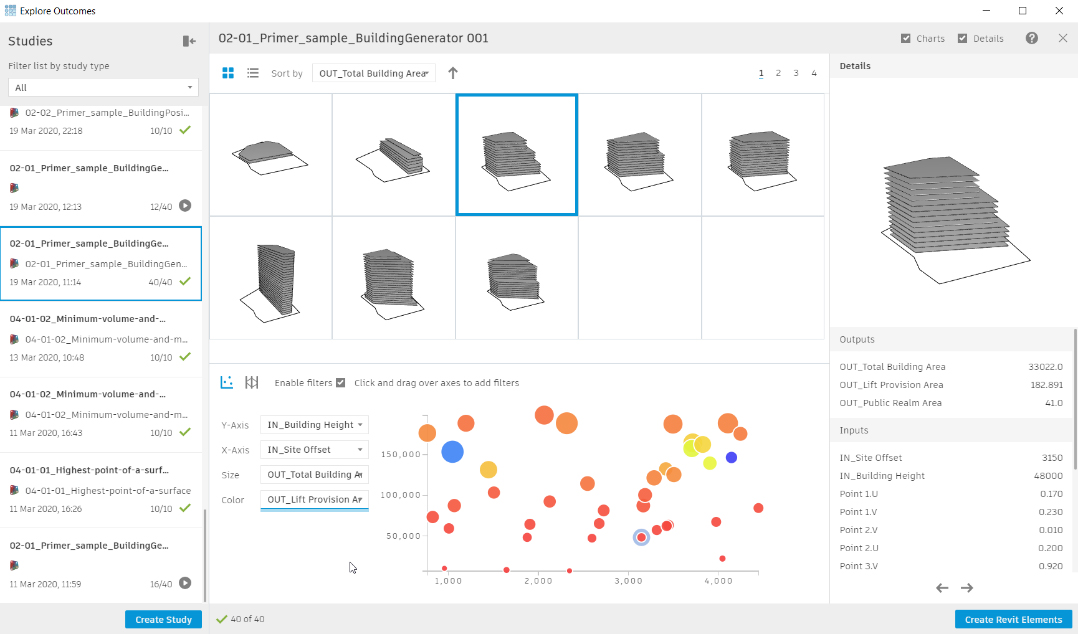
Learn about generative design thinking and build multi-objective design workflows in a Revit project! A parametric model contains many possible design states and configurations. How can we navigate this vast landscape of possibilities to find high-performing designs? This workshop will introduce workflows that help us answer such a question using Dynamo and the new Generative Design in Revit functionality, an Autodesk tool for design option generation, search, optimization and sharing. During this workshop participants will learn how to build geometry generators and evaluators using visual programming in Dynamo; how to use these generators and evaluators to drive multi-objective optimization towards specified goals; and how to evaluate optimal solutions and integrate these designs back to Revit. Each section will begin discussion on generative design thinking and then hands on creation of these ideas using Dynamo and Revit. Session 1 will focus on Dynamo basics: How to create a model for generative design studies. We will begin by developing a common understanding of the mechanics of Dynamo, then move on to build a set of graphs together that will include some basic geometric applications and Revit integration. Session 2 will focus on adding evaluation methods and generating design options. We will go over the fundamentals of optimization and how to frame a design problem in terms of goals and constraints in order to drive multi-objective optimization and evaluation. We will explore the various ways our problem definition can affect the result of the optimization. Session 3 will demonstrate methods to explore and filter design options that we have generated and tell a story about a design direction.
Envisioned Outcomes:
- Learning how to build parametric models that can be used in a generative design workflow.
- Learning how to frame a design problem as an optimization search and how to define evaluation metrics, goals and constraints to drive the optimization.
- Understanding the importance and sensitivity of the design problem and parameter definition to the result of the optimization.
Keywords: Generative Design; Optimization
Software: Autodesk Revit 2021.1 (trial license or free educational license available)
Previous Knowledge Required: To get the most out of the workshop, a basic understanding of Revit and visual programming in Dynamo is required. If you are unsure, please review the skill provided in DynamoPrimer.org and you should be in good shape.
Workshop Schedule: October 24 and 25, 10:00am to 5:00pm EST
AIA Continuing Education: Completion of this workshop earns 10 AIA Learning Units.
Thanks to Platinum Sponsor Autodesk for supporting this workshop.
WORKSHOP 15
Design to Experience: Leveraging Speckle As A Conduit for Unreal Engine in AEC
Workshop Leaders:
Mark Cichy (Principal, Director of Design Technology / HOK Architects)
Mateusz Gawad (Visualization Regional Director / HOK Architects)
Jakir Hussain (Software Developer / AKT II)
Rotimi Seriki (Visualization Specialist Architecture / HOK Architects)
Christopher Zoog (Design Technology Specialist, Advanced Technologies Group / HOK Architects)

The workshop will focus on real-time streaming design content from Rhino & Grasshopper to Unreal Engine via Speckle – an open data platform for AEC. Process workflows will be presented and investigated through a series of applied exercises whereby attendees are encouraged to bring their own design content. Workshop leaders and participants will leverage open source plugins developed under the Epic Mega Grants program to bridge the gap between design stage authoring and game engine visualization. The first part of the session will focus on procedural mapping and content preparation and primarily focuses on the capabilities available in experimental packages and workflows. The latter half of the workshop will immerse attendees in their independent projects so that they may produce tangible geometric and visual outcomes. Leaders will present various methods of automating operations on streamed content and use their applied experience to support the individual effort of the attendees.
The goal of the workshop is to provide attendees with the knowledge required to effectively generate and transfer AEC collateral for coordination and collaboration via game engine technologies in real-time. Attendees may bring their own projects from practice/academia or will be given the opportunity to explore and invent their own design strategies throughout the workshop – iterative conceptual studies will be encouraged to explore a responsive feedback loop. The outcome will be three-fold: (1) optimized AEC models and design content, (2) robust procedural streaming workflows, and (3) experiential real-time visualization content.
Keywords: Visualization; Procedural Mapping; Game Engines
Software: Rhino & Grasshopper (trial & educational licenses available here), Speckle Clients (plugin available here), SpeckleUE Plugin (available here), Unreal Engine 4.25.x (free and available here, requires Epic account for download)
Previous Knowledge Required: Proficiency in Rhino/Grasshopper; basic proficiency in Unreal Engine (familiarity with interface and basic operations)
Workshop Schedule: October 24 and 25, 10:00am to 6:00pm EST
AIA Continuing Education: Completion of this workshop earns 12 AIA Learning Units.
Thanks to Platinum Sponsor Epic Games for supporting this workshop.